Unscrew the four screws that hold the bottom panel using the Phillips 02 screwdriver.
The screws will not come out of the bottom panel. They were designed to become loose but not be removed. This prevents you from losing them, and prevents the Roomba from sucking them up if they came out during cleaning.
Once you are sure that all the screws have been loosened as much as possible, then lift the bottom panel up off the Roomba.
Once the side brush and bottom panel are out of the way, simply grasp the battery by the two green flaps and pull it out.
In the unlikely event that the battery has leaked acid, avoid all contact with it and any surfaces it has affected. Wear protective gloves and wipe up any residue with a paper towel. Secure the battery in a plastic bag and dispose of it properly.
If you get battery acid on your skin or in your eye, flush immediately with water and seek medical attention.
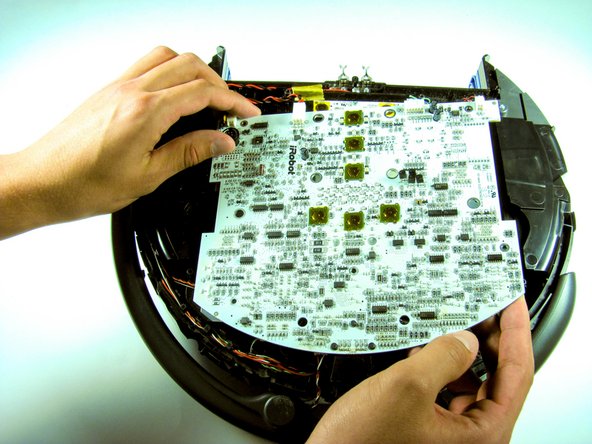
Remove the front bumper. You may remove it with your hands or a tool. It should snap off with some effort. It will still be attached to the Roomba by a couple of wires.
For this next step, it might be helpful to have another set of hands.
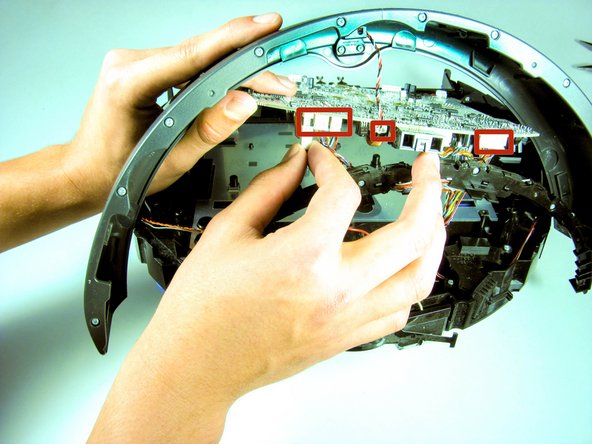
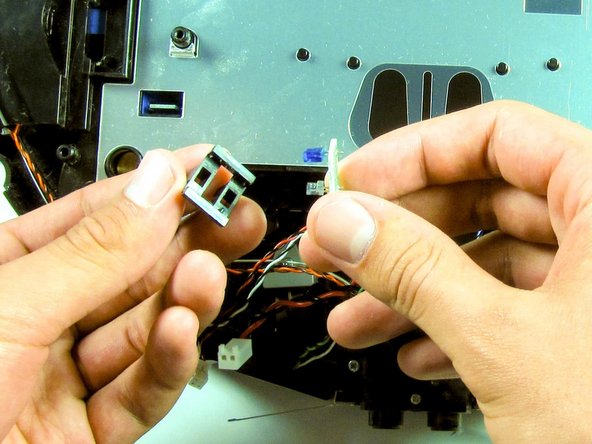
Use a soldering iron to desolder pins on the blue IR receiver. Try repeatedly warming each pin up and giving a tug on the receiver. It should eventually slide out.
You will need to then solder in a new receiver in the exact same place you took the old one out.
Hi, I am curious about this given what my 650 is doing... It turns on and runs for 2 minutes before I get the error about cleaning the wheels. Basically, the Roomba goes in a circle to the left and that's it. Occasionally, it will back up to the right, and then go in a faster circle to the left. If I hit the bumper it will go back to the right and then forward again to the left. I replaced the left wheel and it had no impact. Do you think it's the sensor? Thanks